RTK settings
RTK options#
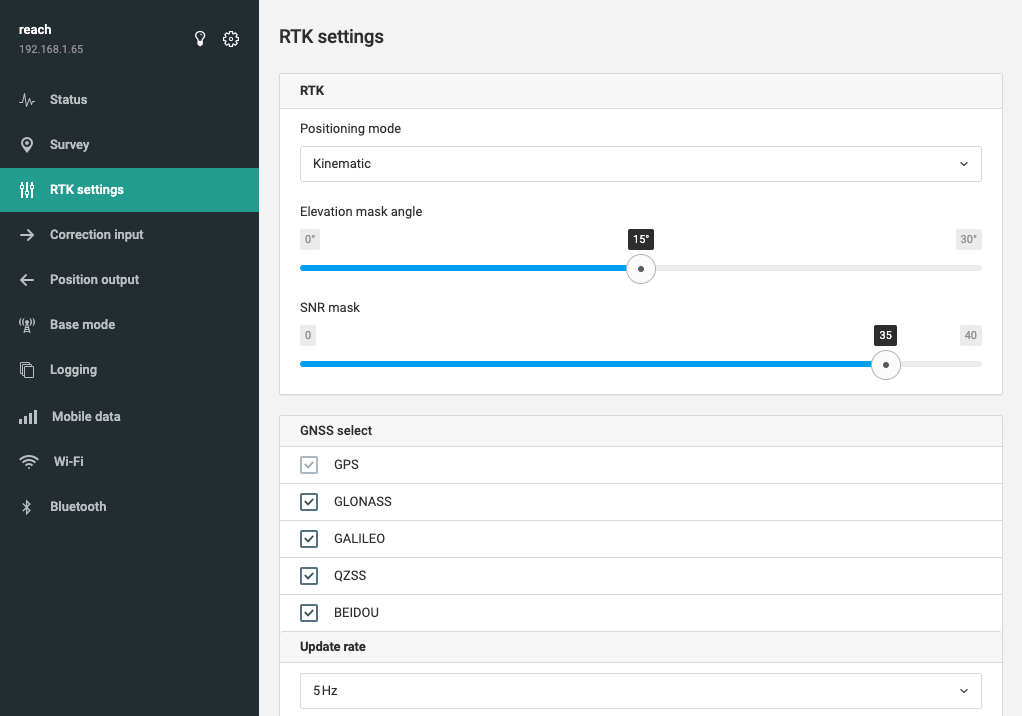
Positioning mode#
- Kinematic assumes that the receiver is moving. It is the most used positioning mode
- Static assumes that Reach RS/RS+ is static. Constraining the system helps to resolve ambiguities faster as well as produce measurements with higher precision
GPS AR mode#
There are two main strategies for resolving ambiguities:
- Fix-and-hold: after the first ambiguity is resolved, all further ambiguities are held constrained. Fix is more stable, but if the first initialization was not correct, it would take longer to recover and initialize correctly. You can think of it as if Fix had inertia.
- Continuous: ambiguities are resolved epoch by epoch. It is less stable, but there is no risk of holding a false fix.
In real-life conditions on a moving platform, Fix-and-hold provides better overall performance.
GLONASS AR mode#
Contrary to GPS, all GLONASS satellites transmit on different frequencies, which results in inter-channel biases (ICB) that are unique for each receiver model.
Reach RS/RS+ can correct GLONASS ICBs, allowing for GLONASS AR with non-Reach bases, such as NTRIP casters. The general recommendation is always to have GLONASS AR set to on.
Elevation mask angle#
Satellites lower than the set elevation will be excluded from the computation. The default setting is 15 degrees. Usually, satellites with a lower elevation provide too noisy measurements.
SNR mask#
Satellites with low SNR will be excluded from the computation. The default setting is 35.
GNSS selection#
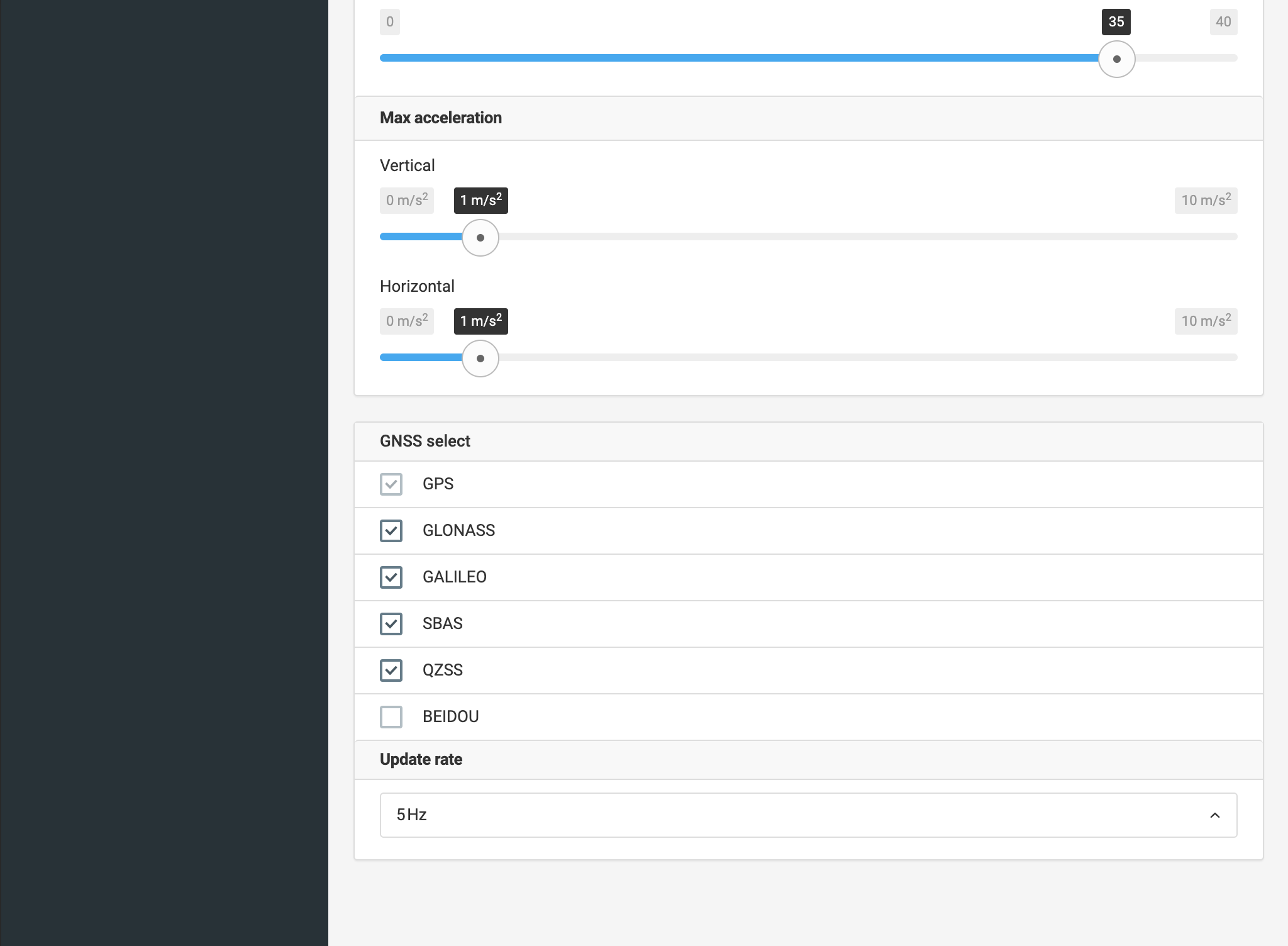
Depending on your location, it might be beneficial to choose certain set of GNSS systems:
GPS + GLONASS + Galileo + SBAS + QZSS at 5 Hz is our default recommendation GPS + BeiDou + Galileo + SBAS + QZSS at 5 Hz recommended for APAC, where QZSS and BeiDou is visible GPS + Galileo + SBAS + QZSS at 14 Hz for most dynamic platforms that require high update rate